



UWB室內(nèi)定位工作原理
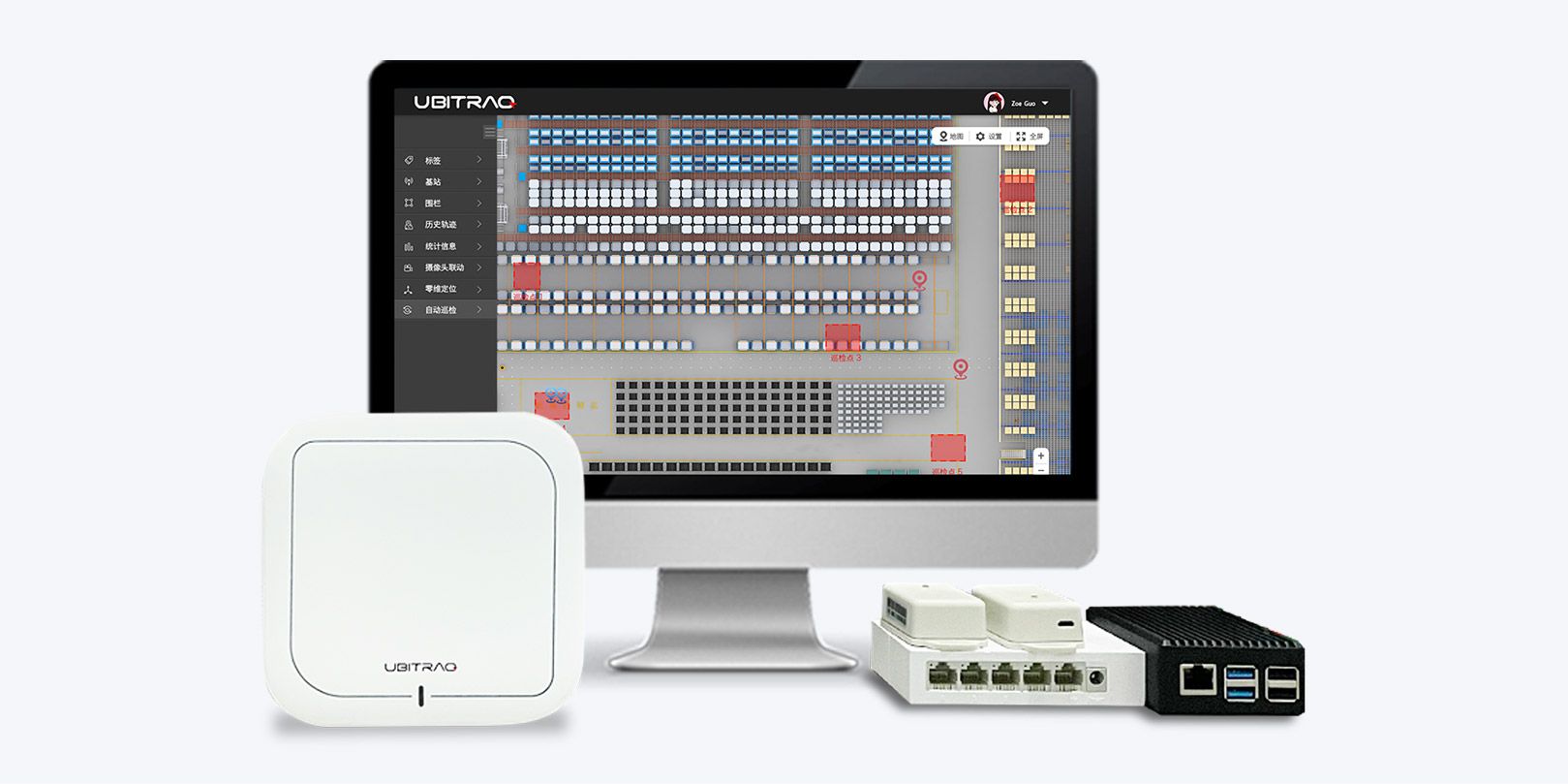
UWB定位系統(tǒng)一般包括未知位置標簽、已知位置基站和數(shù)據(jù)處理終端三部分。
1)未知位置標簽是指需要定位系統(tǒng)進行位置獲取的節(jié)點,,可以發(fā)射也可以反射脈沖信號,。若要發(fā)射 UWB 脈沖信號則需要復雜電路的支撐,若要反射脈沖信號則僅需有源射頻標簽將接收到的脈沖信號放大,、反射即可,。
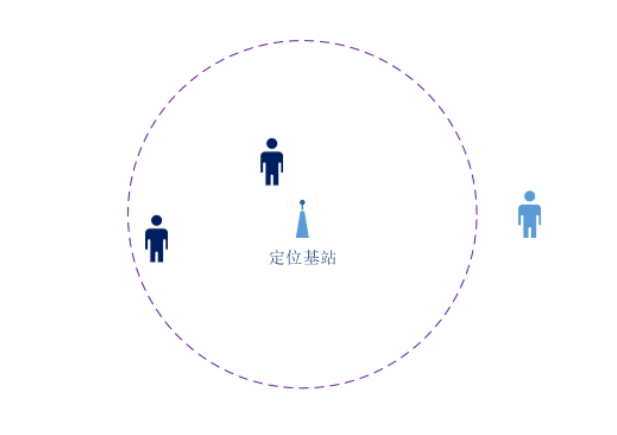
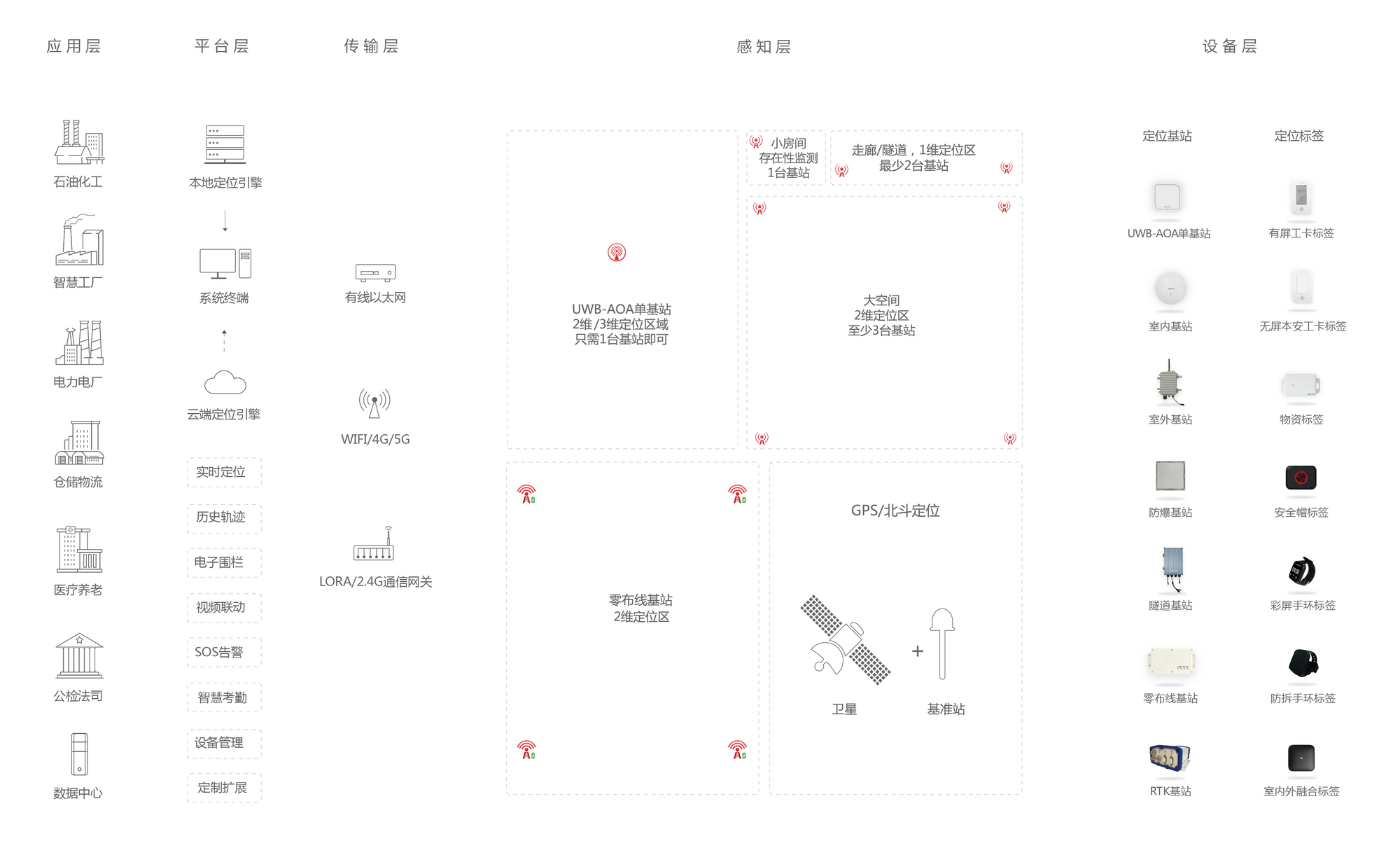
2) 已知位置基站是指預先放置在定位場景中的信號探測器,它們的位置是由人直接指定的,,在定位地圖中坐標信息明確,。當信號探測器接收到標簽發(fā)送的脈沖信號時,會從脈沖信號中提取可供分析的數(shù)據(jù),,如信號強度(RSSI),、接收時間等,并發(fā)送給數(shù)據(jù)處理終端,。一般要獲取定位目標的二維坐標值最少需要3-4臺基站,,全跡UWB-AOA單基站定位1臺基站即可。
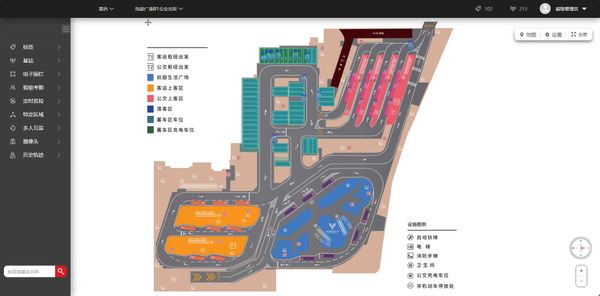
3)數(shù)據(jù)處理終端是指進行分析,、計算和顯示的上位機,,可以通過一定的定位算法將基站傳回的數(shù)據(jù)轉(zhuǎn)化為實際的坐標值,并顯示在定位地圖上,。具有可視化能力,,可以在預先導入的場景地圖上直接看出待測節(jié)點所在的真實位置,對于移動中的待測目標,,甚至可以顯示出其路徑軌跡,。在 UWB定位系統(tǒng)工作過中,已知位置基站與未知位置標簽均會發(fā)射和接收脈沖信號,,其定位工作方式可以分為兩種:已知位置基站優(yōu)先發(fā)射信號,、未知位置標簽優(yōu)先發(fā)射信號。已知位置基站優(yōu)先發(fā)射信號的原理為:當已知位置基站發(fā)射脈沖信號后,,未知位置標簽偵測到此信號,,對其進行接收放大但不會進行信息提取,之后將信號發(fā)送回已知位置基站,。未知位置標簽優(yōu)先發(fā)射信號的原理為:未知位置標簽先將包含自身位置信息的脈沖信號發(fā)送出去,,已知位置基站按收到該信號后,對其進行信息提取進行定位,。

